Email:
sales@dewetron.com.cn
车辆功能安全性测试是指假定汽车传感器发生故障情况下对车辆可控性进行的测试。
2011年11月15日汽车功能安全性标准ISO 26262正式颁布,这一新标准给汽车制造商提出了新的挑战:
每个厂家必须测试当汽车传感器发生故障时车辆的可控性。
实际上,这意味着底盘技术部门或者功能安全性测试部门需要采集在模拟某传感器失灵时,车辆在各种驾
驶操作情况下的性能数据。该测试的难点在于:高精度的位置测量(±3cm)、ECU(电子控制单元)
内部数据、模拟传感器信号、车辆CAN 总线数据,甚至是视频信号的采集,都必须是完全同步的。
针对该测试应用,德维创公司与世界著名汽车厂家长期合作,已经形成了一套完整的测试方案,可以轻松
应对诸多挑战:
n 基于实测数据的车辆安全完整性等级(Automotive Safety Integrity level--ASIL)测定;
n 在传感器失效情况下的驾驶安全性评估;
n 车辆定位,偏航轨迹,偏航率;
n CAN、FlexRay、XCP数据采集;
n 测试数据建档,可回溯。

图示一:通过XCP(车用检测标定协议)以太网接口读取的ECU(电子控制单元)测试系统的参数。
下面以具体实例来说明:
一个OEM客户联系德维创公司,要求测试在一个偏航角速度传感器发生故障时车辆的偏航情况。这个测试
以前也做过,不过当时仅仅是凭驾驶员的主观感觉来判定驾驶操作的危险程度,这不符合新颁布的ISO标
准。为了得到客观的数据,该客户的汽车装备了德维创的测试仪器,包括INS/GPS系统和一个安装在试验
场的DGPS基站。这样的配置可以使测量的位置精度达到±3 cm。
该客户的实际测试情况为:驾驶员驾驶车辆以大约20 °/s的角速度在一圆形环道上行驶,通过对CAN总线
信号加入一个阶梯函数来模拟偏航角速度传感器的故障。测试的结果是汽车偏离原来的轨迹达3.5米。
图示2:测试过程中的实时屏幕显示
这样的测试结果对OEM客户意味着什么呢?
一旦偏航角速度传感器发生故障,车辆可能会偏离到另一条车道而导致交通事故。当然OEM客户的目标是
任何时候都能正常控制车辆。因此ESP(电子稳定系统)系统就需要改进。当然客户不仅仅是想得到车辆偏
离轨迹的结果,而是更要了解ECU内部的数据。对于这样的情况,大部分ECU的内部数据都可以通过一
个特殊的接口(网口XCP协议)进行读取一个ESP的内部大概有30000个参数。德维创支持XCP以太网接
口,这样就使得ECU更像一个智能传感器。
为了改进ESP系统,在测试中我们需要同步采集ECU内部参数。对照测试数据,我们发现ESP系统没有针对航向
速度传感器信号做充分的真实性检查。在这种情况下, ESP应当判断出传感器信号是错误的信号。
利用德维创测试系统,可以改进和验证ECU软件控制算法,从而判断传感器信号的真假,以此来正确控制车辆。
在对ESP进行改进后,再进行同样的测试,ESP可以识别偏航角速度传感器信号的是无效的,而不会有任何动
作。这样,车辆就不会改变行驶轨迹而保证安全。

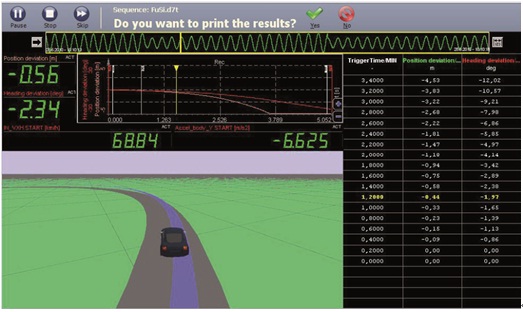
图示3:测试完成画面
测试步骤:
为了测试在假定角速度传感器故障情况下的车辆可控性,需要做2个测试,一个是以恒定的速度在一条笔直的车道上
驾驶或以0.5g的恒定侧向加速度在一个环形道路行驶,另一个是在特定的弯道(例如猎犬曲线,ISO变换车道试验规
定的路线)上行驶。
如果ECU出现故障信号,汽车可能会发生侧滑而偏离车道。德维创系统已经准备好了两种测试的系统配置文件:一种
是为匀速直线行驶或稳态环形道路测试,而另一种是为特定的道路测试。当然,这些系统配置文件稍加修改即可用于
其它各种不同测试项目。
总结:
为了验证车辆的功能性安全而进行的车辆可控性测试,需要在模拟传感器故障情况下进行不同的驾驶操作。德维创系
统是第一个可以测定偏航和偏航角速度变化的测试系统供应商,它可以同步测量所有车辆数据,ECU内部XCP数据和
高精度的车辆位置数据。它不再依靠驾驶员的主管感觉来确定驾驶操作的危险程度。按照新颁布的ISO标准的要求驾
驶实验可以重复进行。